Глава 3. Общие сведения о металлорежущих станках и технологическом процессе обработки на них
Для изготовления детали рабочим органам станка необходимо сообщить определенные согласованные движения, при которых с заготовки снимается избыточный материал — припуск (см.гл.2).
В станках бывает вращательное или поступательное (возвратно-поступа¬тельное) движение резания, сообщаемое заготовке или режущему инстру¬менту. На всех изучаемых станках — токарных, фрезерных, сверлильных и шлифовальных, — движение резания вращательное. На станках для лезвий¬ной обработки резанием (токарных, фрезерных, сверлильных) скорость ре¬зания (м/мин) определяется по формуле: v=пdn/1000, где d — диаметр обра¬батываемой поверхности заготовки или инструмента, мм; n — частота их вращения, мин1 (об/мин). Для шлифовальных станков (при абразивной об¬работке) скорость резания (м/с) vшл=пdкрnКр/(1000-60).
Движение подачи непрерывное на токарных, фрезерных и сверлильных станках. На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
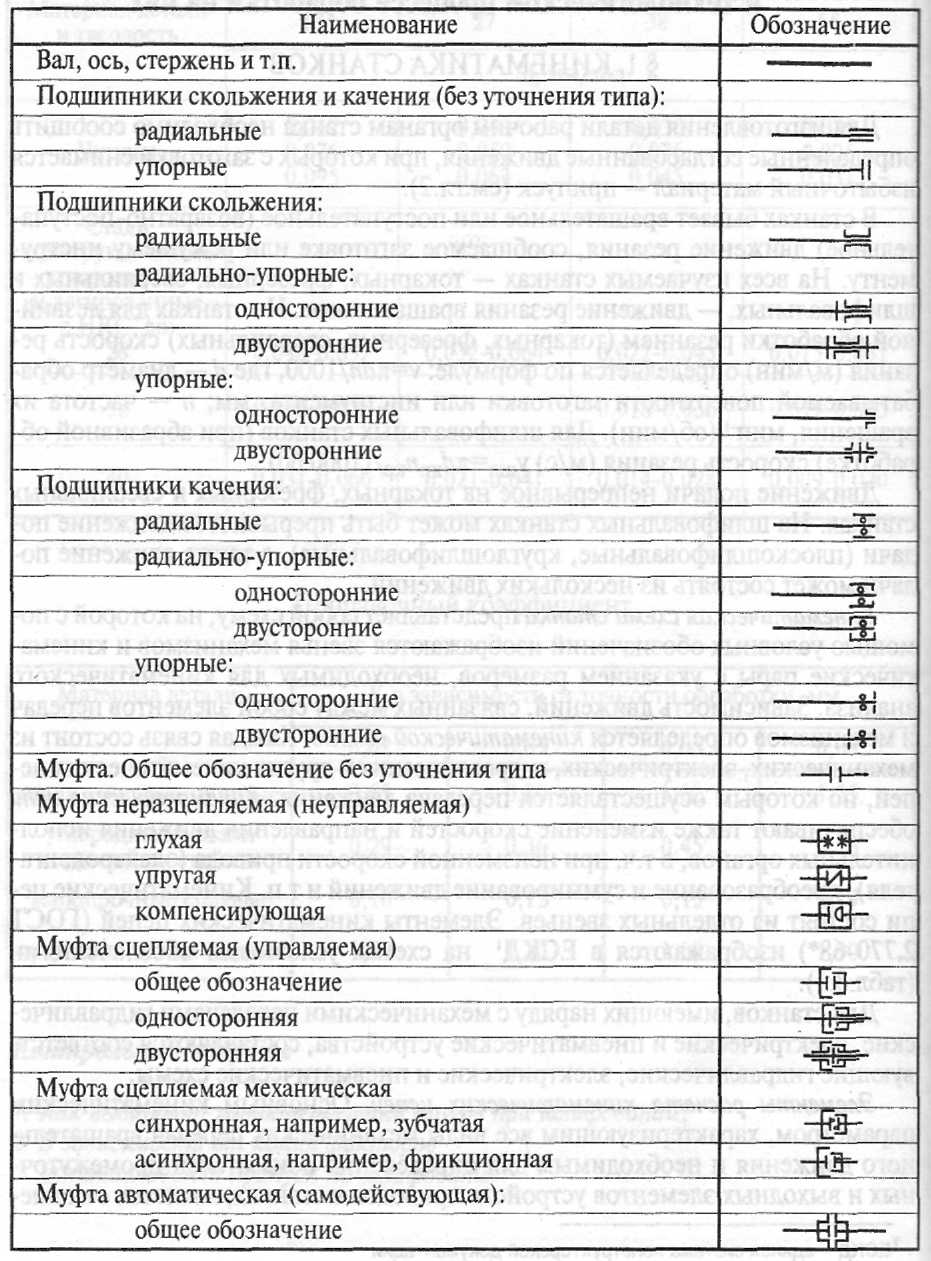
Кинематическая схема станка представляет собой схему, на которой с по¬мощью условных обозначений изображаются звенья механизмов и кинема¬тические пары с указанием размеров, необходимых для кинематического анализа. Зависимость движений, связанных между собой элементов передач и механизмов определяется кинематической связью. Каждая связь состоит из механических, электрических, гидравлических и других кинематических це¬пей, по которым осуществляется передача движения. Кинематические цепи обеспечивают также изменение скоростей и направления движения испол¬нительных органов, в т.ч. при неизменной скорости привода (электродвига¬теля), преобразование и суммирование движений и т.п. Кинематические це¬пи состоят из отдельных звеньев. Элементы кинематических цепей (ГОСТ 2.770-68*) изображаются в ЕСКД1 на схемах условными обозначениями (табл.3.1).
Для станков, имеющих наряду с механическими передачами гидравличе¬ские, электрические и пневматические устройства, составляются соответст¬вующие гидравлические, электрические и пневматические схемы.
Элементы расчета кинематических цепей. Основным кинематическим параметром, характеризующим все виды механических передач вращатель¬ного движения и необходимым для определения показателей промежуточ¬ных и выходных элементов устройств приводов в станках, является отноше-
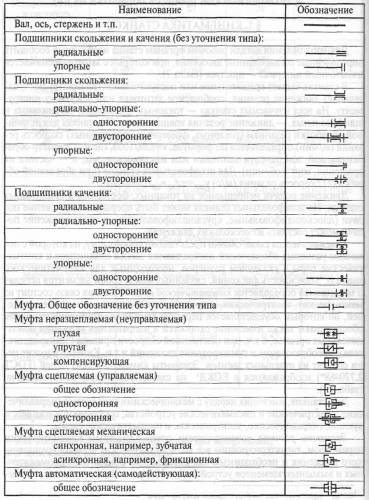
3.1. Условное обозначение элементов кинематики
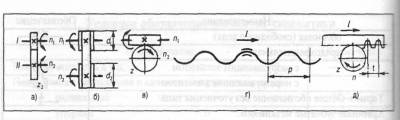
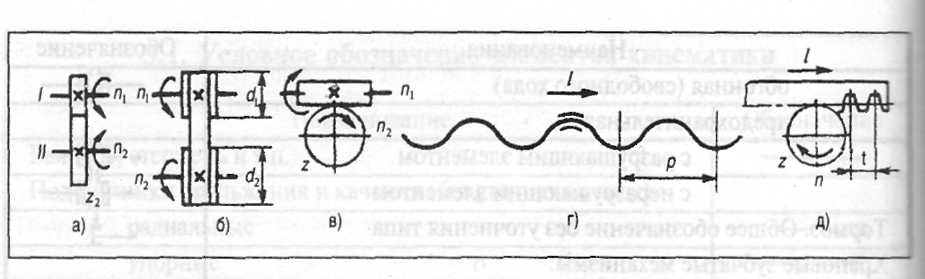
ние i2 частоты вращения n — ведомого вала II(рис.3.1,а) к частоте вращения n1 ведущего вала (мин1):Следовательно, для ременной передачи (рис.3.1,6) i=d1/d2, где d1 и d2 — диаметр соответственно ведущего и ведомого шкивов; для зубчатых (рис.3.1,а) и цепных передач i=z1/z2, где z1 и z2 - число зубьев соответственно ведущего и ведомого колес или ведущей и ведомой звездочек; для червячной передачи (рис.3.1,в) i'=K/z, где К— число заходов червяка; г — число зубьев червячного колеса.
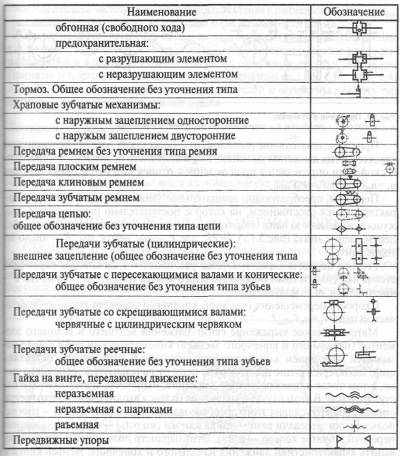
Рис.3.1. Передачи в станках:
а - зубчатая; б - ременная; в - червячная; г - винтовая; д - реечная
При последовательном расположении нескольких передач соотношение характеристик движения начального nн и конечного nк элементов кинемати¬ческой цепи определяется произведением отношений Г отдельных передач:
Передачи, преобразующие вращательное движение в поступательное, ха¬рактеризуются расстоянием, на которое поступательно перемещается дви¬жущийся элемент за один оборот приводного. Так, для передачи винт-гайк2 перемещение винта (рис.3.1,г), l=РК, где Р— шаг винта, мм; К— число за¬ходов винта.
Реечная передача характеризуется расстоянием l, на которое перемеша¬ется рейка (мм) за один оборот зубчатого колеса (рис.3.1.д): 1=пmz, где г — число зубьев; т — модуль, мм.
Скорость перемещения (мм/мин) конечного элемента (узла) кинемати¬ческой цепи vк=пнi'0бЩl.
Математическое выражение связи движений ведущего и ведомого эле¬ментов (начального и конечного звеньев) кинематической цепи станка на¬зывается уравнением кинематического баланса. В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
Для станков с главным вращательным движением предельные значения частот вращения шпинделя nmin и nmах обеспечивают обработку заготовки с диаметром обрабатываемых поверхностей в диапазоне от dmах до dmin.
Диапазон регулирования частоты вращения шпинделя определяется отношение
наибольшей частоты вращения шпинделя станка к наименьшей: D=nmax/NMIN. ЭТОТ диапазон характеризует эксплуатационные возможности станка.
Значения частот вращения от nmin до nmax образуют ряд. В станкостроении, как правило, применяют геометрический ряд, в котором смежные значения и различаются в ф раз (ф — знаменатель ряда): n2/n1=n3/п2=n4/n3=...=nj/nj-1=ф. Приняты и нормализованы следующие знаменатели ф: 1,06; 1,12; 1,26, 1,41; 1.58; 1,78; 2,00. Значения указанных знаменателей ф положены в основу таб¬личных рядов частот вращений шпинделя.
Автор - nastia19071991
Для изготовления детали рабочим органам станка необходимо сообщить определенные согласованные движения, при которых с заготовки снимается избыточный материал — припуск (см.гл.2).
В станках бывает вращательное или поступательное (возвратно-поступа¬тельное) движение резания, сообщаемое заготовке или режущему инстру¬менту. На всех изучаемых станках — токарных, фрезерных, сверлильных и шлифовальных, — движение резания вращательное. На станках для лезвий¬ной обработки резанием (токарных, фрезерных, сверлильных) скорость ре¬зания (м/мин) определяется по формуле: v=пdn/1000, где d — диаметр обра¬батываемой поверхности заготовки или инструмента, мм; n — частота их вращения, мин1 (об/мин). Для шлифовальных станков (при абразивной об¬работке) скорость резания (м/с) vшл=пdкрnКр/(1000-60).
Движение подачи непрерывное на токарных, фрезерных и сверлильных станках. На шлифовальных станках может быть прерывистое движение по¬дачи (плоскошлифовальные, круглошлифовальные), а также движение по¬дачи может состоять из нескольких движений.
Кинематическая схема станка представляет собой схему, на которой с по¬мощью условных обозначений изображаются звенья механизмов и кинема¬тические пары с указанием размеров, необходимых для кинематического анализа. Зависимость движений, связанных между собой элементов передач и механизмов определяется кинематической связью. Каждая связь состоит из механических, электрических, гидравлических и других кинематических це¬пей, по которым осуществляется передача движения. Кинематические цепи обеспечивают также изменение скоростей и направления движения испол¬нительных органов, в т.ч. при неизменной скорости привода (электродвига¬теля), преобразование и суммирование движений и т.п. Кинематические це¬пи состоят из отдельных звеньев. Элементы кинематических цепей (ГОСТ 2.770-68*) изображаются в ЕСКД1 на схемах условными обозначениями (табл.3.1).
Для станков, имеющих наряду с механическими передачами гидравличе¬ские, электрические и пневматические устройства, составляются соответст¬вующие гидравлические, электрические и пневматические схемы.
Элементы расчета кинематических цепей. Основным кинематическим параметром, характеризующим все виды механических передач вращатель¬ного движения и необходимым для определения показателей промежуточ¬ных и выходных элементов устройств приводов в станках, является отноше-
3.1. Условное обозначение элементов кинематики
ние i2 частоты вращения n — ведомого вала II(рис.3.1,а) к частоте вращения n1 ведущего вала (мин1):Следовательно, для ременной передачи (рис.3.1,6) i=d1/d2, где d1 и d2 — диаметр соответственно ведущего и ведомого шкивов; для зубчатых (рис.3.1,а) и цепных передач i=z1/z2, где z1 и z2 - число зубьев соответственно ведущего и ведомого колес или ведущей и ведомой звездочек; для червячной передачи (рис.3.1,в) i'=K/z, где К— число заходов червяка; г — число зубьев червячного колеса.
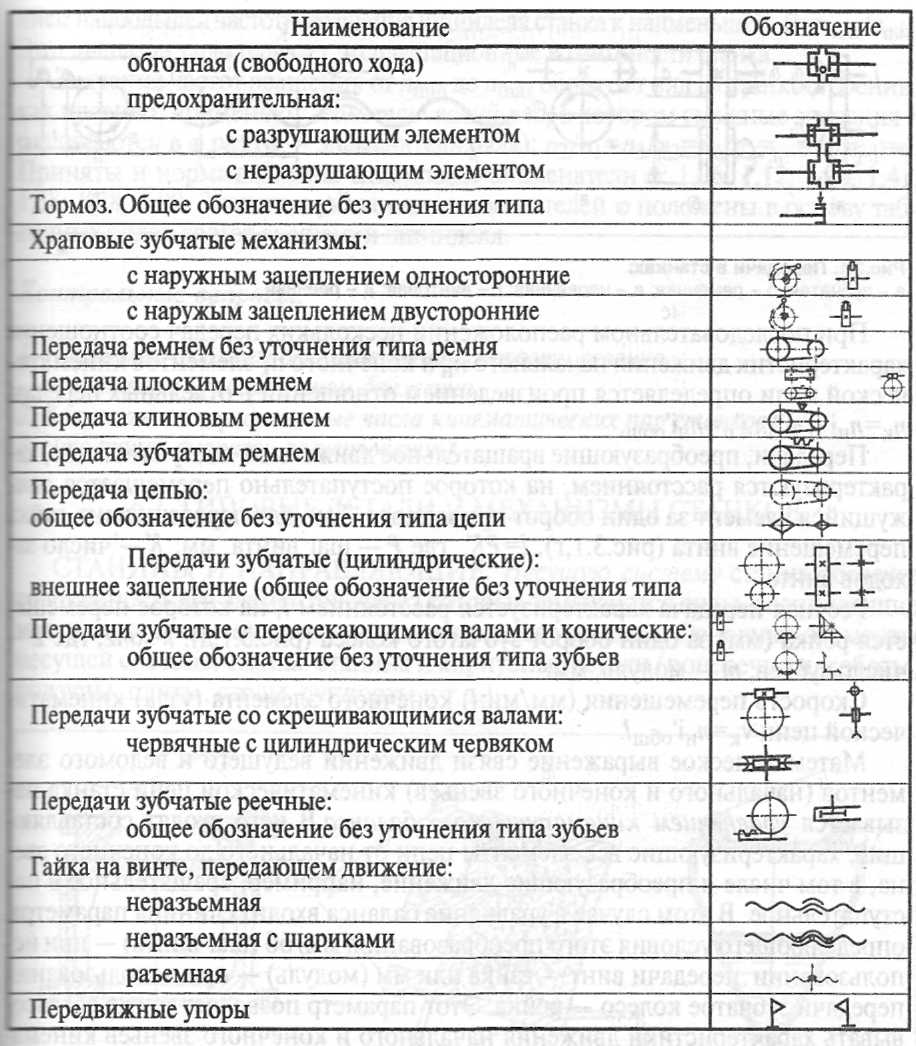
Рис.3.1. Передачи в станках:
а - зубчатая; б - ременная; в - червячная; г - винтовая; д - реечная
При последовательном расположении нескольких передач соотношение характеристик движения начального nн и конечного nк элементов кинемати¬ческой цепи определяется произведением отношений Г отдельных передач:
Передачи, преобразующие вращательное движение в поступательное, ха¬рактеризуются расстоянием, на которое поступательно перемещается дви¬жущийся элемент за один оборот приводного. Так, для передачи винт-гайк2 перемещение винта (рис.3.1,г), l=РК, где Р— шаг винта, мм; К— число за¬ходов винта.
Реечная передача характеризуется расстоянием l, на которое перемеша¬ется рейка (мм) за один оборот зубчатого колеса (рис.3.1.д): 1=пmz, где г — число зубьев; т — модуль, мм.
Скорость перемещения (мм/мин) конечного элемента (узла) кинемати¬ческой цепи vк=пнi'0бЩl.
Математическое выражение связи движений ведущего и ведомого эле¬ментов (начального и конечного звеньев) кинематической цепи станка на¬зывается уравнением кинематического баланса. В него входят составляю¬щие, характеризующие все элементы цепи от начального до конечного зве¬на, в том числе и преобразующие движение, например, вращательное в по¬ступательное. В этом случае в уравнение баланса входит единица параметра. определяющего условия этого преобразования: мм/об (шаг винта) — при использовании передачи винт — гайка или мм (модуль) — при использовании передачи зубчатое колесо — рейка. Этот параметр позволяет также согласо¬вывать характеристики движения начального и конечного звеньев кинема¬тической цепи. При передаче только вращательного движения в уравнение входят безразмерные составляющие (отношения i механизмов и отдельных передач), в связи с чем единицы параметров движения конечного и началь¬ного звеньев одинаковы.
Для станков с главным вращательным движением предельные значения частот вращения шпинделя nmin и nmах обеспечивают обработку заготовки с диаметром обрабатываемых поверхностей в диапазоне от dmах до dmin.
Диапазон регулирования частоты вращения шпинделя определяется отношение
наибольшей частоты вращения шпинделя станка к наименьшей: D=nmax/NMIN. ЭТОТ диапазон характеризует эксплуатационные возможности станка.
Значения частот вращения от nmin до nmax образуют ряд. В станкостроении, как правило, применяют геометрический ряд, в котором смежные значения и различаются в ф раз (ф — знаменатель ряда): n2/n1=n3/п2=n4/n3=...=nj/nj-1=ф. Приняты и нормализованы следующие знаменатели ф: 1,06; 1,12; 1,26, 1,41; 1.58; 1,78; 2,00. Значения указанных знаменателей ф положены в основу таб¬личных рядов частот вращений шпинделя.
Автор - nastia19071991
- Войдите, чтобы оставлять комментарии