СТАНИНЫ И НАПРАВЛЯЮЩИЕ. Несущую систему станка образует совокупность его элементов, через которые замыкаются силы, возникающие между инструментом и заготовкой в процессе резания. Основные элементы несущей системы станка: станина и корпусные детали (поперечины, хоботы, ползуны, плиты, столы, суппорты и т.д.).
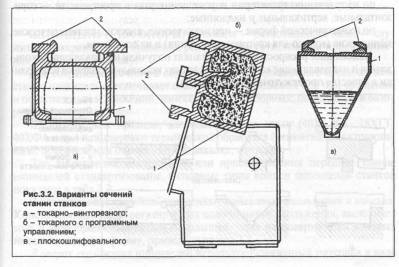
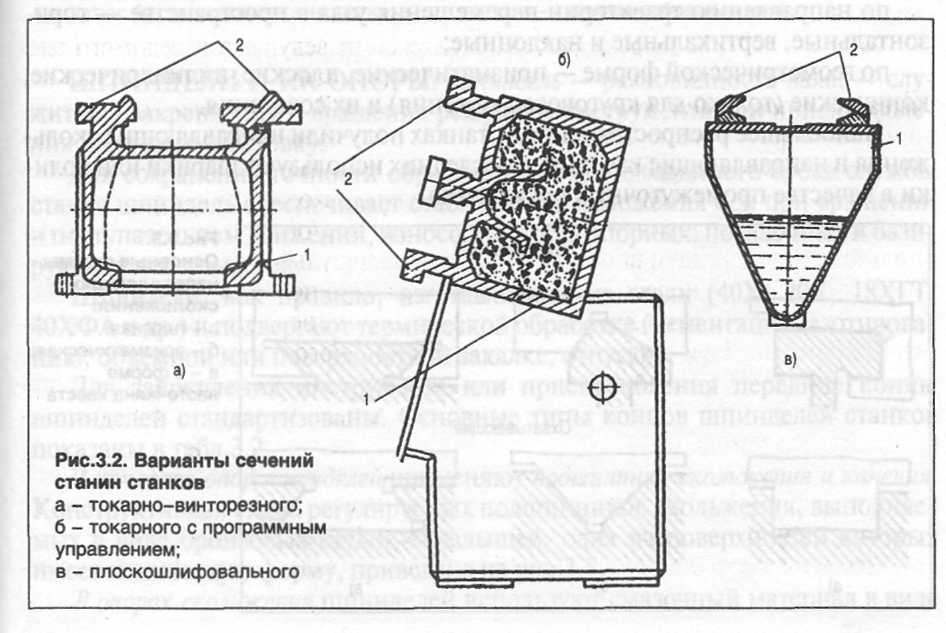
Станина 1 (рис.3.2) служит для монтажа деталей и узлов станка, относительно нее ориентируются и перемещаются подвижные детали и узлы. Станина так же, как и другие элементы несущей системы, должна обладать стабильностью своих свойств и обеспечивать в течение срока службы станка возможность обработки заготовок с заданными режимами и точностью. Это достигается правильным выбором материала станины и технологией ее изготовления, износостойкостью направляющих.
Основной материал для изготовления станин: чугун — для литых станин, сталь — для сварных, для изготовления станин тяжелых станков иногда применяют железобетон, для станков высокой точности — искусственный материал — синтегран, изготовляемый на основе крошки минеральных материалов и смолы и характеризующийся незначительными температурными деформациями.
Направляющие 2 (см.рис.3.2) обеспечивают требуемое взаимное расположение и возможность относительного перемещения узлов, несущих инструмент и заготовку. Направляющие для перемещения узла допускают только одну степень свободы движения благодаря конструкции.
По назначению и конструктивному исполнению направляющие классифицируют:
по виду движения — главного движения и движения подачи; направляющие для перестановки сопряженных и вспомогательных узлов, неподвиж¬ных в процессе обработки;
по траектории движения — прямолинейного и кругового движения;
по направлению траектории перемещения узла в пространстве — горизонтальные, вертикальные и наклонные;
по геометрической форме — призматические, плоские, цилиндрические конические (только для кругового движения) и их сочетания.
Наибольшее распространение в станках получили направляющие скольжения и направляющие качения, в последних используют шарики или ролики в качестве промежуточных тел качения.
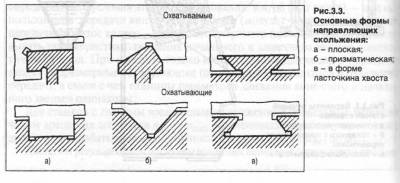
Материал для изготовления направляющих скольжения (рис.3.3) — серый чугун. Он используется в тех случаях, когда направляющие изготовляют как одно целое со станиной. Износостойкость направляющих повышают поверхностной закалкой с твердостью HRC3 42-56.
Стальные направляющие выполняют накладными, обычно закаленными с твердостью HRC3 58-63. Чаще всего используют сталь 40Х с закалкой ТВЧ, пали 15Х и 20Х с последующей цементацией и закалкой.
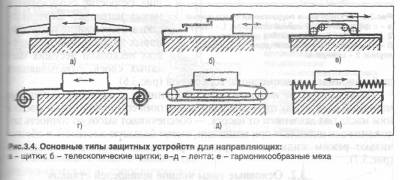
Надежная работа направляющих зависит от защитных устройств, предохраняющих рабочие поверхности от попадания на них пыли, стружки, грязи (рис.3.4). Защитные устройства изготовляют из различных материалов, в том числе полимерных.
ШПИНДЕЛИ И ИХ ОПОРЫ. Шпиндель — разновидность вала, — служит для закрепления и вращения режущего инструмента или приспособления, несущего заготовку.
Для сохранения точности обработки в течение заданного срока службы станка шпиндель обеспечивает стабильность положения оси при вращении поступательном движении, износостойкость опорных, посадочных и базирующих поверхностей.
Шпиндели, как правило, изготавливают из стали (40Х, 20Х, 18ХГТ, 40ХФА и др.) и подвергают термической обработке (цементации, азотиров¬нию, объемной или поверхностной закалке, отпуску).
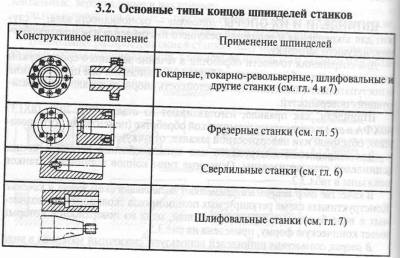
Для закрепления инструмента или приспособления передние концы шпинделей стандартизованы. Основные типы концов шпинделей станков показаны в табл.3.2.
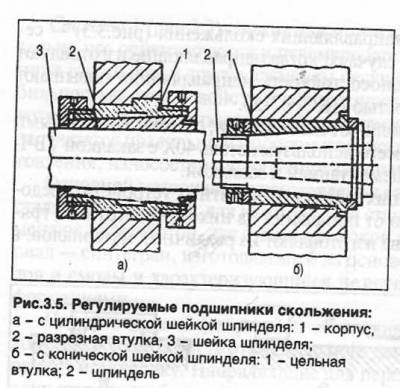
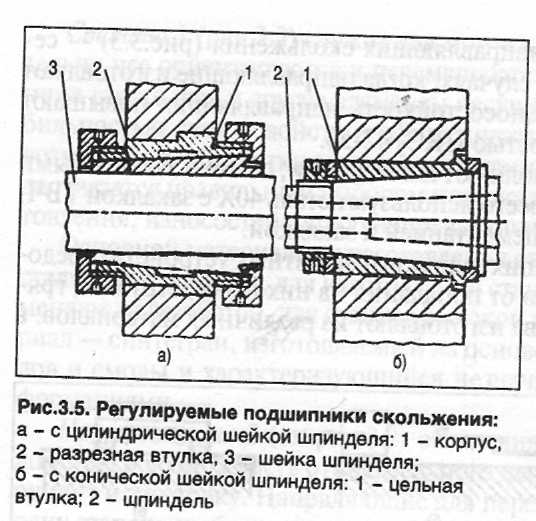
В качестве опор шпинделей применяют подшипники скольжения и качения. Конструктивная схема регулируемых коническую форму, приведена на рис.3.5.
В опорах скольжения шпинделей используют смазочный материал в виде жидкости (гидростатические и гидродинамические) или газа (аэродинамические и аэростатические) подшипников скольжения, выполняемых в виде бронзовых втулок-вкладышей, одна из поверхностей которых имеет.
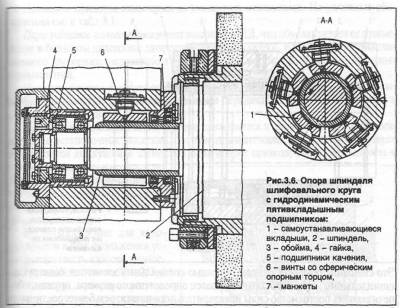
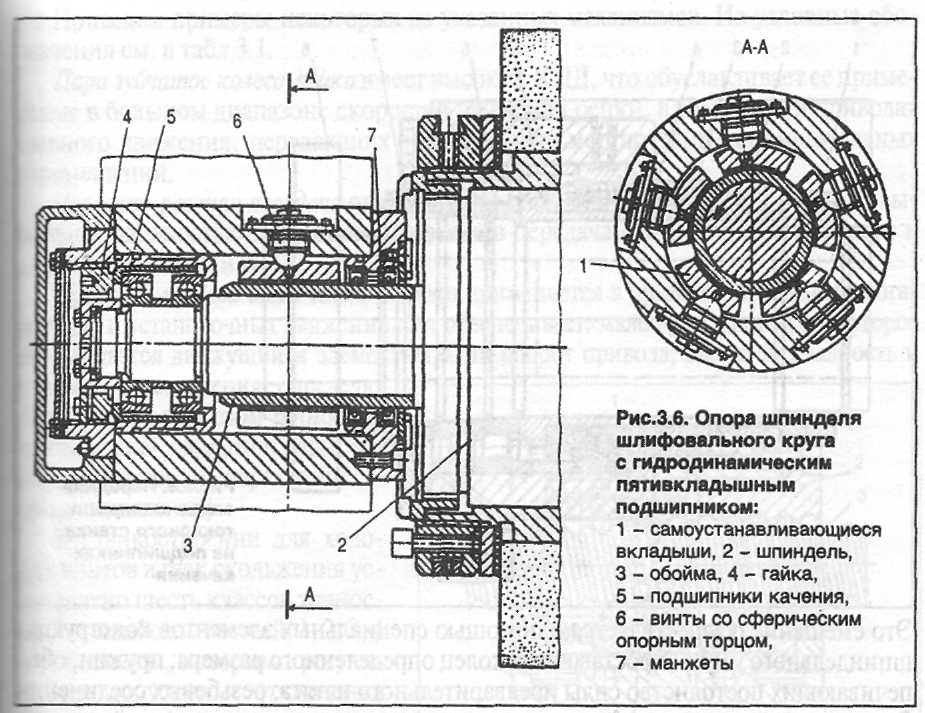
Гидродинамические подшипники выполняются одно- и многоклиновыми. Одноклиновые наиболее просты по конструкции (втулка), но не обеспечивают стабильного положения шпинделя при больших скоростях скольжения и малых нагрузках. Этот недостаток отсутствует в многоклиновых подшипниках, имеющих несколько несущих масляных слоев, охватывающих шейку шенделя равномерно со всех сторон (рис 3 6).
Гидростатические подшипники - подшипники скольжения, в которых масляный слой между трущимися поверхностями создается путем подвода к ним масла под давлением от насоса, - обеспечивают высокую точность положения оси шпинделя при вращении, имеют большую жесткость и обеспечивают режим жидкостного трения при малых скоростях скольжения

Подшипники с газовой смазкой (аэродинамические и аэростатические) по конструкции подобны подшипникам гидравлическим, но обеспечивают меньшие потери на трение. Эта особенность позволяет применять такие подшипники в опорах быстроходных шпинделей.
Подшипники качения в качестве опор шпинделей широко применяют в ланках разных типов. В связи с повышенными требованиями к точности вращения шпинделей в их опорах применяют подшипники высоких классов точности, устанавливаемые с предварительным натягом, который позволяет устранить вредное влияние зазоров. Натяг в радиально-упорных шариковых и конических роликовых подшипниках создается при их парной установке благодаря осевому смещению внутренних колец относительно наружных.
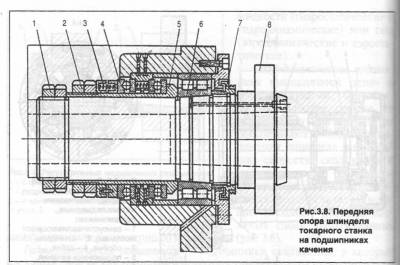
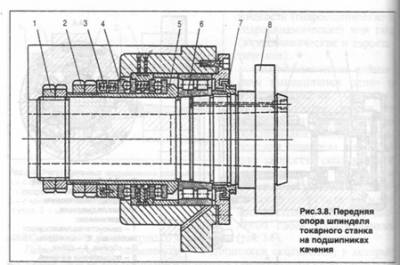
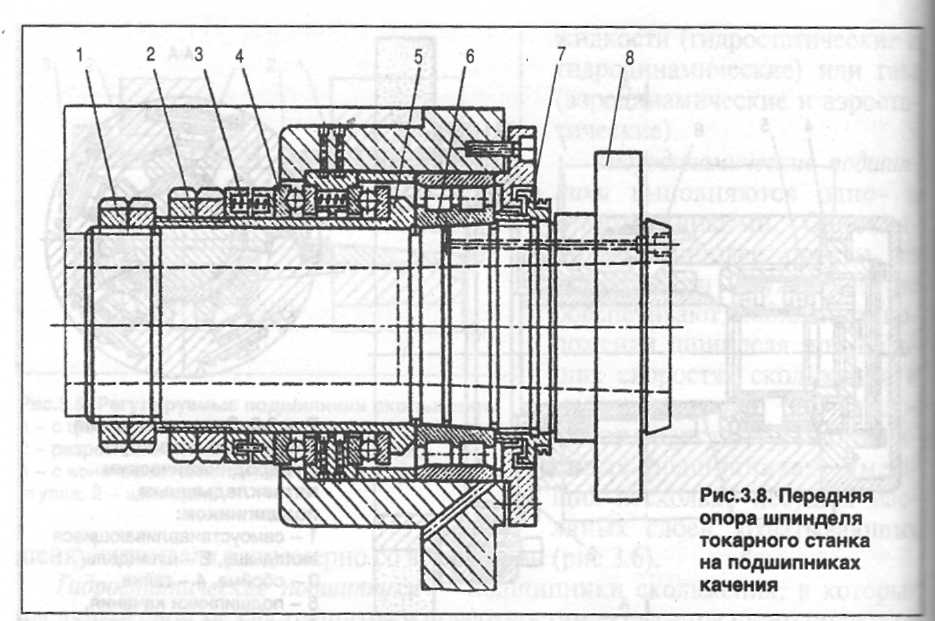
Это смещение осуществляется с помощью специальных элементов конструкций шпиндельного узла — проставочных колец определенного размера; пружин, обеспечивающих постоянство силы предварительного натяга; резьбовых соединений. В роликоподшипниках с цилиндрическими роликами предварительный натяг создается за счет деформирования внутреннего кольца 6 (рис.3.8) при затяжке его на коническую шейку шпинделя 8 с помощью втулки 5, перемещаемой гайками L Подшипники шпиндельных опор надежно защищены от загрязнения и вытекания смазочного материала манжетными и лабиринтными уплотнениями 7.
Подшипники качения 4 широко используют в качестве упорных, фиксирующих положение шпинделя в осевом направлении и воспринимающих возникающее в этом направлении нагрузки. Предварительный натяг шариковых упорных подшипников 4 создается пружинами 3. Регулирование пружин осуществляется гайками 1
Пример использования радиально-упорных шариковых подшипников для вос¬приятия осевых нагрузок приведен на рис.3.6. Предварительный натяг создается регулировкой положения наружных колец подшипников 5 с помощью гайки 4.
ТИПОВЫЕ МЕХАНИЗМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ. Поступательное движение в рассматриваемых станках осу¬ществляется следующим образом:
механизмами, преобразующими вращательное движение в поступательное — зубчатое колесо или червяк с рейкой, ходовой винт — гайка и другие механизмы;
гидравлическими устройствами с парой цилиндр — поршень;
электромагнитными устройствами типа соленоидов, используемыми в ос¬новном в приводах систем управления.
Приведем примеры некоторых из указанных механизмов. Их условные обо¬значения см. в табл.3.1.
Пара зубчатое колесо-рейка имеет высокий КПД, что обуславливает ее применение в большом диапазоне скоростей движения рейки, в том числе в приводах плавного движения, передающих значительную мощность, и вспомогательных перемещений.

Червячно-реечная передача отличается от пары зубчатое колесо — рейка повышенной плавностью движения. Однако эта передача сложнее в изготовлении и имеет более низкий КПД.
Механизм ходовой винт-гайка широко применяется в приводах подач, вспомогательных и установочных движений. Он обеспечивает: малое расстояние, на которое перемещается движущийся элемент за один оборот привода; высокую плавность и точность перемещения, определяемую главным образом точностью изготовления элементов пары; самоторможение (в парах винт — гайка скольжения).
В станкостроении для ходоки винтов и гаек скольжения установлено шесть классов точности: 0 — наиболее точный; 1,2,3,4 и 5-й классы, которыми регулируются допустимые отклонения по шагу, профилю, диаметрам и пo параметру шероховатости поверхности. Конструкция гаек зависит от назначения механизма. В связи с низким КПД пары ходовой винт — гайка скольжения заменяют винтовыми парами качения (рис.3.9). В этих парах устраняется износ, уменьшаются потери на трение и могут быть устранены зазоры за счет создания предвари¬тельного натяга.
Недостатки, присущие парам винт — гайка скольжения и винт — гайка качения, связанные с особенностями их эксплуатации и изготовления, исключены в гидростатической передаче винт — гайка. Пара работает в условиях трения со смазоч¬ным материалом; КПД передачи достигает 0,99. Масло подается в карманы, выполненные на бо¬ковых сторонах резьбы гайки.
ТИПОВЫЕ МЕХАНИЗМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПЕРИОДИЧЕСКИХ ДВИЖЕНИЙ. Для некоторых станков рабочий процесс построен таким образом, что для его осуществления требуется периодическое перемещение (изменение положения) отдельных узлов или элементов станка.
Периодические движения могут осуществляться храповыми и мальтийскими механизмами, механизмами кулачковыми и с муфтами обгона, электро-, пневмо, и гидромеханизмами.
Храповые механизмы (рис.3.10) наиболее часто используют в механизмах подачи станков, в которых периодическое перемещение заготовки, режущего (резца, шлифовального круга) или вспомогательного (алмаз для правки шлифовального круга) инструмента производится во время перебега или обратного (вспомогательного) хода (в шлифовальных и других станках).
В большинстве случаев храповые механизмы используют для прямолинейного перемещения соответствующего узла (стола, суппорта, пиноли). С помощью храповой передачи осуществляют также и круговые периодические перемещения.
Муфты служат для соединения двух соосных валов. По назначению различают муфты нерасцепляемые, сцепляемые и предохранительные.
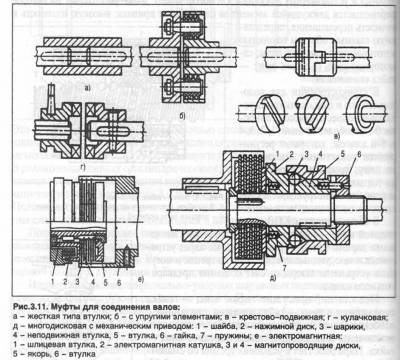
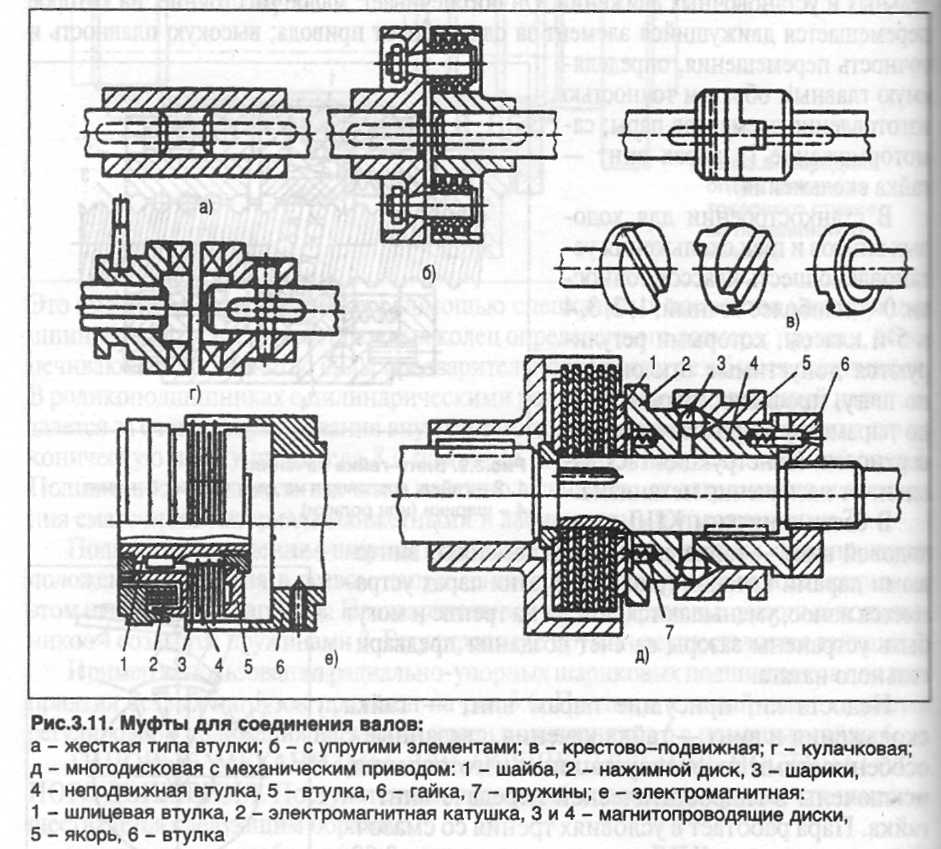
Нерасцепляемые муфты (рис.3.11, а, б, в) служат для жесткого (глухого) соединения валов. Например, соединения с помощью втулки, через упругие элементы или через промежуточный элемент, имеющий на торцовых плоскостях два взаимно перпендикулярных выступа и позволяющий компенсировать несоосность соединяемых валов.
Сцепляемые муфты (рис.3.11, г, д, е) применяют для периодического соединения валов. В станках используют сцепляемые кулачковые муфты в виде дисков с торцовыми зубьями-кулачками и зубчатые муфты. Недостатком таких сцепляемых муфт является трудность их включения при большой разнице в угловых скоростях ждущего и ведомого элементов. Фрикционные муфты не имеют недостатка, присущего кулачковым муфтам, и позволяют включить их при любых скоростях вра-
щения ведущего и ведомого элементов. Фрикционные муфты бывают конусные и дисковые. В приводах главного движения и подачи широко применяют многодисковые муфты, передающие значительные крутящие моменты при сравнительно небольших габаритах. Сжатие ведущих дисков с ведомыми осуществляется с помощью механического, электромагнитного и реже гидравлического привода.
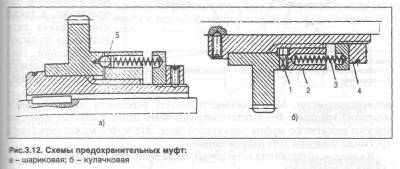
Предохранительные муфты (рис.3.12), соединяют два вала при нормальных условиях работы и разрывают кинематическую цепь при повышении нагрузки. Разрыв цепи может происходить при разрушении специального элемента или путем проскальзывания сопрягаемых и трущихся частей (например, дисков) или расцепления кулачков двух сопрягаемых частей муфты.
В качестве разрушаемого элемента обычно используют штифт, площадь сечения которого рассчитывают на передачу заданного крутящего момента. Расцепление сопрягаемых элементов муфты происходит при условии, что осевая сила, возникающая на зубьях, кулачках 1 или шариках 5, при перегрузках превышает силу, создаваемую пружинами 3 и регулируемую гайкой 4. При смещении подвижный элемент 2 муфты воздействует, например, на концевой выключатель, разрывающий электрическую цепь питания двигателя привода.
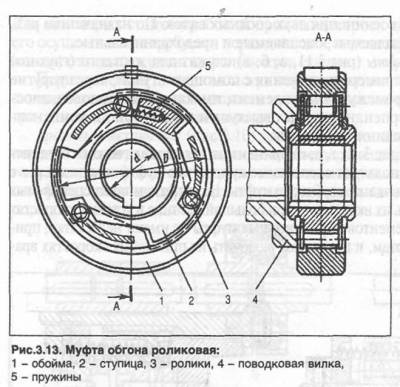
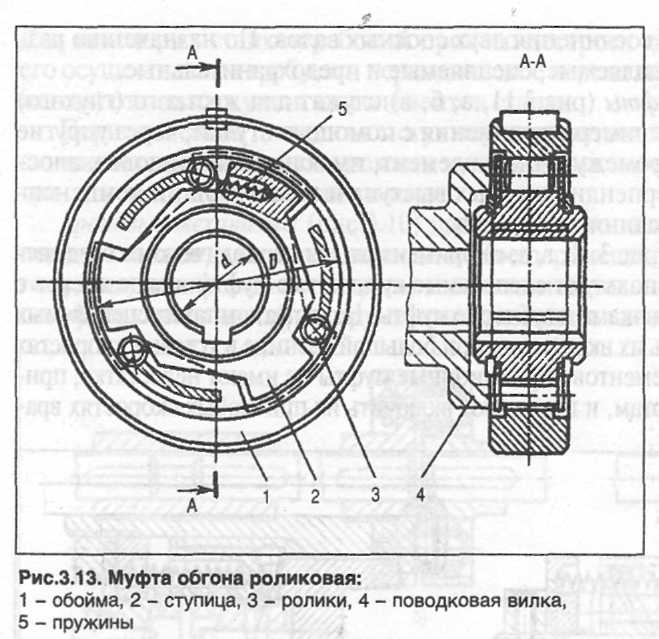
Муфты обгона (рис.3.13) предназначены для передачи крутящего момента при вращении звеньев кинематической цепи в заданном направлении и для разъединения звеньев при вращении в обратном направлении, а также для передачи валу различных по частоте вращений (например, медленного — рабочего вращения и быстрого —
вспомогательного. Муфта обгона позволяет передавать дополнительное (быстрое) вращение без выключения основной цепи. В станках наиболее широко применяют муфты роликового типа. Эта муфта может передавать крутящий момент в двух направлениях.
В качестве муфт обгона используют также храповые механизмы.
Автор - nastia19071991
Станина 1 (рис.3.2) служит для монтажа деталей и узлов станка, относительно нее ориентируются и перемещаются подвижные детали и узлы. Станина так же, как и другие элементы несущей системы, должна обладать стабильностью своих свойств и обеспечивать в течение срока службы станка возможность обработки заготовок с заданными режимами и точностью. Это достигается правильным выбором материала станины и технологией ее изготовления, износостойкостью направляющих.
Основной материал для изготовления станин: чугун — для литых станин, сталь — для сварных, для изготовления станин тяжелых станков иногда применяют железобетон, для станков высокой точности — искусственный материал — синтегран, изготовляемый на основе крошки минеральных материалов и смолы и характеризующийся незначительными температурными деформациями.

Направляющие 2 (см.рис.3.2) обеспечивают требуемое взаимное расположение и возможность относительного перемещения узлов, несущих инструмент и заготовку. Направляющие для перемещения узла допускают только одну степень свободы движения благодаря конструкции.
По назначению и конструктивному исполнению направляющие классифицируют:
по виду движения — главного движения и движения подачи; направляющие для перестановки сопряженных и вспомогательных узлов, неподвиж¬ных в процессе обработки;
по траектории движения — прямолинейного и кругового движения;
по направлению траектории перемещения узла в пространстве — горизонтальные, вертикальные и наклонные;
по геометрической форме — призматические, плоские, цилиндрические конические (только для кругового движения) и их сочетания.
Наибольшее распространение в станках получили направляющие скольжения и направляющие качения, в последних используют шарики или ролики в качестве промежуточных тел качения.

Материал для изготовления направляющих скольжения (рис.3.3) — серый чугун. Он используется в тех случаях, когда направляющие изготовляют как одно целое со станиной. Износостойкость направляющих повышают поверхностной закалкой с твердостью HRC3 42-56.
Стальные направляющие выполняют накладными, обычно закаленными с твердостью HRC3 58-63. Чаще всего используют сталь 40Х с закалкой ТВЧ, пали 15Х и 20Х с последующей цементацией и закалкой.
Надежная работа направляющих зависит от защитных устройств, предохраняющих рабочие поверхности от попадания на них пыли, стружки, грязи (рис.3.4). Защитные устройства изготовляют из различных материалов, в том числе полимерных.
ШПИНДЕЛИ И ИХ ОПОРЫ. Шпиндель — разновидность вала, — служит для закрепления и вращения режущего инструмента или приспособления, несущего заготовку.
Для сохранения точности обработки в течение заданного срока службы станка шпиндель обеспечивает стабильность положения оси при вращении поступательном движении, износостойкость опорных, посадочных и базирующих поверхностей.
Шпиндели, как правило, изготавливают из стали (40Х, 20Х, 18ХГТ, 40ХФА и др.) и подвергают термической обработке (цементации, азотиров¬нию, объемной или поверхностной закалке, отпуску).
Для закрепления инструмента или приспособления передние концы шпинделей стандартизованы. Основные типы концов шпинделей станков показаны в табл.3.2.
В качестве опор шпинделей применяют подшипники скольжения и качения. Конструктивная схема регулируемых коническую форму, приведена на рис.3.5.

В опорах скольжения шпинделей используют смазочный материал в виде жидкости (гидростатические и гидродинамические) или газа (аэродинамические и аэростатические) подшипников скольжения, выполняемых в виде бронзовых втулок-вкладышей, одна из поверхностей которых имеет.
Гидродинамические подшипники выполняются одно- и многоклиновыми. Одноклиновые наиболее просты по конструкции (втулка), но не обеспечивают стабильного положения шпинделя при больших скоростях скольжения и малых нагрузках. Этот недостаток отсутствует в многоклиновых подшипниках, имеющих несколько несущих масляных слоев, охватывающих шейку шенделя равномерно со всех сторон (рис 3 6).
Гидростатические подшипники - подшипники скольжения, в которых масляный слой между трущимися поверхностями создается путем подвода к ним масла под давлением от насоса, - обеспечивают высокую точность положения оси шпинделя при вращении, имеют большую жесткость и обеспечивают режим жидкостного трения при малых скоростях скольжения

Подшипники с газовой смазкой (аэродинамические и аэростатические) по конструкции подобны подшипникам гидравлическим, но обеспечивают меньшие потери на трение. Эта особенность позволяет применять такие подшипники в опорах быстроходных шпинделей.
Подшипники качения в качестве опор шпинделей широко применяют в ланках разных типов. В связи с повышенными требованиями к точности вращения шпинделей в их опорах применяют подшипники высоких классов точности, устанавливаемые с предварительным натягом, который позволяет устранить вредное влияние зазоров. Натяг в радиально-упорных шариковых и конических роликовых подшипниках создается при их парной установке благодаря осевому смещению внутренних колец относительно наружных.
Это смещение осуществляется с помощью специальных элементов конструкций шпиндельного узла — проставочных колец определенного размера; пружин, обеспечивающих постоянство силы предварительного натяга; резьбовых соединений. В роликоподшипниках с цилиндрическими роликами предварительный натяг создается за счет деформирования внутреннего кольца 6 (рис.3.8) при затяжке его на коническую шейку шпинделя 8 с помощью втулки 5, перемещаемой гайками L Подшипники шпиндельных опор надежно защищены от загрязнения и вытекания смазочного материала манжетными и лабиринтными уплотнениями 7.
Подшипники качения 4 широко используют в качестве упорных, фиксирующих положение шпинделя в осевом направлении и воспринимающих возникающее в этом направлении нагрузки. Предварительный натяг шариковых упорных подшипников 4 создается пружинами 3. Регулирование пружин осуществляется гайками 1
Пример использования радиально-упорных шариковых подшипников для вос¬приятия осевых нагрузок приведен на рис.3.6. Предварительный натяг создается регулировкой положения наружных колец подшипников 5 с помощью гайки 4.
ТИПОВЫЕ МЕХАНИЗМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ. Поступательное движение в рассматриваемых станках осу¬ществляется следующим образом:
механизмами, преобразующими вращательное движение в поступательное — зубчатое колесо или червяк с рейкой, ходовой винт — гайка и другие механизмы;
гидравлическими устройствами с парой цилиндр — поршень;
электромагнитными устройствами типа соленоидов, используемыми в ос¬новном в приводах систем управления.
Приведем примеры некоторых из указанных механизмов. Их условные обо¬значения см. в табл.3.1.
Пара зубчатое колесо-рейка имеет высокий КПД, что обуславливает ее применение в большом диапазоне скоростей движения рейки, в том числе в приводах плавного движения, передающих значительную мощность, и вспомогательных перемещений.
Червячно-реечная передача отличается от пары зубчатое колесо — рейка повышенной плавностью движения. Однако эта передача сложнее в изготовлении и имеет более низкий КПД.
Механизм ходовой винт-гайка широко применяется в приводах подач, вспомогательных и установочных движений. Он обеспечивает: малое расстояние, на которое перемещается движущийся элемент за один оборот привода; высокую плавность и точность перемещения, определяемую главным образом точностью изготовления элементов пары; самоторможение (в парах винт — гайка скольжения).
В станкостроении для ходоки винтов и гаек скольжения установлено шесть классов точности: 0 — наиболее точный; 1,2,3,4 и 5-й классы, которыми регулируются допустимые отклонения по шагу, профилю, диаметрам и пo параметру шероховатости поверхности. Конструкция гаек зависит от назначения механизма. В связи с низким КПД пары ходовой винт — гайка скольжения заменяют винтовыми парами качения (рис.3.9). В этих парах устраняется износ, уменьшаются потери на трение и могут быть устранены зазоры за счет создания предвари¬тельного натяга.
Недостатки, присущие парам винт — гайка скольжения и винт — гайка качения, связанные с особенностями их эксплуатации и изготовления, исключены в гидростатической передаче винт — гайка. Пара работает в условиях трения со смазоч¬ным материалом; КПД передачи достигает 0,99. Масло подается в карманы, выполненные на бо¬ковых сторонах резьбы гайки.

ТИПОВЫЕ МЕХАНИЗМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПЕРИОДИЧЕСКИХ ДВИЖЕНИЙ. Для некоторых станков рабочий процесс построен таким образом, что для его осуществления требуется периодическое перемещение (изменение положения) отдельных узлов или элементов станка.
Периодические движения могут осуществляться храповыми и мальтийскими механизмами, механизмами кулачковыми и с муфтами обгона, электро-, пневмо, и гидромеханизмами.
Храповые механизмы (рис.3.10) наиболее часто используют в механизмах подачи станков, в которых периодическое перемещение заготовки, режущего (резца, шлифовального круга) или вспомогательного (алмаз для правки шлифовального круга) инструмента производится во время перебега или обратного (вспомогательного) хода (в шлифовальных и других станках).
В большинстве случаев храповые механизмы используют для прямолинейного перемещения соответствующего узла (стола, суппорта, пиноли). С помощью храповой передачи осуществляют также и круговые периодические перемещения.
Муфты служат для соединения двух соосных валов. По назначению различают муфты нерасцепляемые, сцепляемые и предохранительные.
Нерасцепляемые муфты (рис.3.11, а, б, в) служат для жесткого (глухого) соединения валов. Например, соединения с помощью втулки, через упругие элементы или через промежуточный элемент, имеющий на торцовых плоскостях два взаимно перпендикулярных выступа и позволяющий компенсировать несоосность соединяемых валов.
Сцепляемые муфты (рис.3.11, г, д, е) применяют для периодического соединения валов. В станках используют сцепляемые кулачковые муфты в виде дисков с торцовыми зубьями-кулачками и зубчатые муфты. Недостатком таких сцепляемых муфт является трудность их включения при большой разнице в угловых скоростях ждущего и ведомого элементов. Фрикционные муфты не имеют недостатка, присущего кулачковым муфтам, и позволяют включить их при любых скоростях вра-

щения ведущего и ведомого элементов. Фрикционные муфты бывают конусные и дисковые. В приводах главного движения и подачи широко применяют многодисковые муфты, передающие значительные крутящие моменты при сравнительно небольших габаритах. Сжатие ведущих дисков с ведомыми осуществляется с помощью механического, электромагнитного и реже гидравлического привода.
Предохранительные муфты (рис.3.12), соединяют два вала при нормальных условиях работы и разрывают кинематическую цепь при повышении нагрузки. Разрыв цепи может происходить при разрушении специального элемента или путем проскальзывания сопрягаемых и трущихся частей (например, дисков) или расцепления кулачков двух сопрягаемых частей муфты.
В качестве разрушаемого элемента обычно используют штифт, площадь сечения которого рассчитывают на передачу заданного крутящего момента. Расцепление сопрягаемых элементов муфты происходит при условии, что осевая сила, возникающая на зубьях, кулачках 1 или шариках 5, при перегрузках превышает силу, создаваемую пружинами 3 и регулируемую гайкой 4. При смещении подвижный элемент 2 муфты воздействует, например, на концевой выключатель, разрывающий электрическую цепь питания двигателя привода.
Муфты обгона (рис.3.13) предназначены для передачи крутящего момента при вращении звеньев кинематической цепи в заданном направлении и для разъединения звеньев при вращении в обратном направлении, а также для передачи валу различных по частоте вращений (например, медленного — рабочего вращения и быстрого —
вспомогательного. Муфта обгона позволяет передавать дополнительное (быстрое) вращение без выключения основной цепи. В станках наиболее широко применяют муфты роликового типа. Эта муфта может передавать крутящий момент в двух направлениях.
В качестве муфт обгона используют также храповые механизмы.
Автор - nastia19071991
- Войдите, чтобы оставлять комментарии